联系方式:15950349828
手臂是桁架机器人机械手的重要组成部分,在相应的载荷和速度下,可以在机械手所需的工作空间内运动。设计上下料机械手时应遵循以下原则:
1.自动上下料机械手的关节轴应尽可能相互平行;垂直轴应尽可能相交于一点,这样可以简化机械手的正逆运动学操作,便于机械手的控制。
2.减少摩擦是机器人操作手的工作条件之一。桁架机械手还应尽可能减少机械间隙引起的运动误差。因此,在设计桁架机械手时,上下料机械手各关节的轴承间隙应尽可能小,各关节应有一个工作可靠、易于调整的轴承间隙调整机构。
3.在上下料机械手有足够的强度和刚度的情况下,尽量在结构和材料上减轻手臂的重量。力求选用高强度轻质材料,通常选用高强度铝合金制造机械手的手臂。为了提高桁架机械手的运动速度和控制精度。
4.上下料机械手的结构中,应考虑各关节的限位开关、具有相应缓冲能力的机器限位块,以及驱动装置、传动机构等部件的安装。
5.上下料机械手的手臂相对于其关节旋转轴应尽量平衡重量,这对于降低电机负载、提高机械手手臂运动的响应速度非常有利。在设计上下料机械手时,应尽可能利用安装在机械手上的机电元件和装置的重量来减轻机械手臂的不平衡重量。如有必要,应设计平衡机构来平衡臂的剩余不平衡重量。
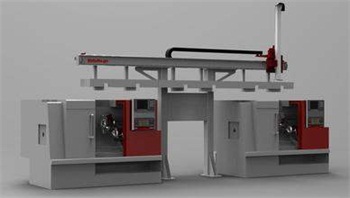
6.门式桁架机械手的结构尺寸应满足机械手工作空间的要求。工作空间的形状和大小与机械臂的长度和臂关节的转动范围密切相关。但是桁架机械手手臂末端的工作空间没有考虑机械手手腕的空间姿态要求。如果对机械手手腕的姿态提出具体要求,其手臂末端可达到的空间要小于没有上述手腕姿态时的工作空间。
在数控车间,机械加工行业使用大量数控机床上下料机械手代替传统的手工或半自动生产线,具有高精度、高服从性、柔性自动化的特点,是决定数控机床未来在世界机械制造技术市场地位的必由之路,也是工厂自动化的基础。